El sistema de transporte por vía no tripulado para minas subterráneas

Funciones del sistema
El sistema de locomotora eléctrica sin conductor consta de un sistema de control de operación automática (ATO), una unidad de control PLC, una unidad de posicionamiento de precisión, una unidad dispensadora inteligente, una unidad de red de comunicación inalámbrica, una unidad de control de cierre centralizado de señal de interruptor, un monitoreo de video y video AI sistema y un centro de control.
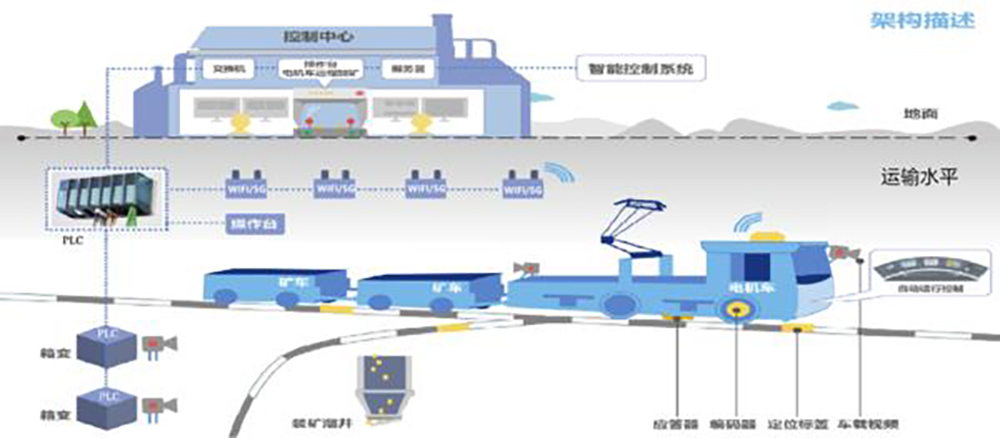
Breve descripción de la función
Operación de crucero completamente automática:De acuerdo con la teoría del crucero de velocidad fija, de acuerdo con la situación real y los requisitos en cada punto del nivel de transporte, el modelo de crucero del vehículo se construye para realizar el ajuste autónomo de la velocidad de viaje de la locomotora.
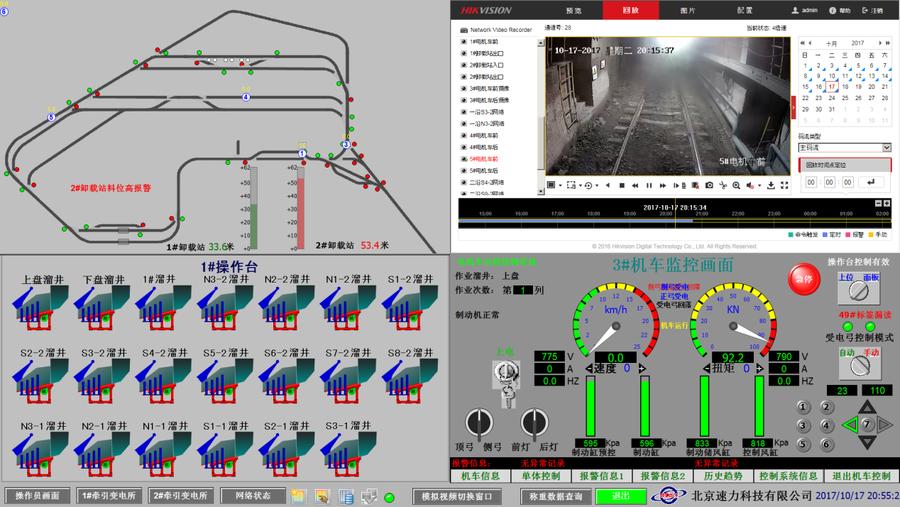
Sistema de posicionamiento preciso:el posicionamiento preciso de la locomotora se logra mediante tecnología de comunicación y tecnología de reconocimiento de baliza, etc., con elevación automática de la proa y ajuste autónomo de la velocidad.
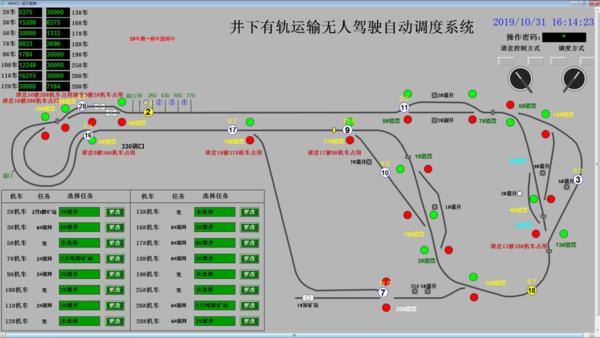
Despacho inteligente:A través de la recopilación de datos como el nivel de material y el grado de cada tolva, y luego de acuerdo con la posición en tiempo real y el estado operativo de cada locomotora, la locomotora se asigna automáticamente al trabajo.
Carga manual remota:La carga manual remota se puede lograr en la superficie controlando el equipo de carga.(Sistema de carga totalmente automático opcional)
Detección de obstáculos y protección de seguridad:Al agregar un dispositivo de radar de alta precisión frente al vehículo para lograr la detección de personas, vehículos y rocas que caen frente al vehículo, para garantizar la distancia segura del vehículo, el vehículo completa de forma autónoma una serie de operaciones como sonar la bocina y el frenado.
Función de estadísticas de producción:El sistema realiza automáticamente un análisis estadístico de los parámetros de funcionamiento de la locomotora, las trayectorias de funcionamiento, los registros de comandos y la finalización de la producción para formar informes de funcionamiento de la producción.
Aspectos destacados del sistema.
Operación automática de sistemas de transporte ferroviario subterráneo.
Pioneros en un nuevo modo de operación para locomotoras electivas subterráneas sin conductor.
Realización de la gestión en red, digital y visual de los sistemas de transporte ferroviario subterráneo.

Análisis de beneficios de la efectividad del sistema
Subterráneos desatendidos, optimizando los patrones de producción.
Racionalización del número de personas que trabajan y reducción de los costes laborales.
Mejorar el entorno de trabajo y aumentar la seguridad intrínseca.
Mecanismos operativos inteligentes para la gestión del cambio.
Beneficios económicos.
-Eficiencia:mayor productividad con una sola locomotora.
Producción estable a través de la distribución inteligente del mineral.
-Personal:conductor de locomotora y operador de liberación de minas en uno.
Un trabajador puede controlar varias locomotoras.
Reducción del número de personal en puestos en el punto de descarga de la mina.
-Equipo:reduciendo el costo de la intervención humana en el equipo.
Beneficios de la gestión.
Análisis de los datos del equipo para permitir el mantenimiento previo del equipo y reducir los costos de administración del equipo.
Mejore los modelos de producción, optimice la dotación de personal y reduzca los costes de gestión de personal.





